
- 热点文章
-
- 09-14关于高等职业院校弱电专业教改的探索
- 11-28东芝将在2009年CES带来新水平的前沿技术
- 11-28互联网:世界的镜子
- 11-28中美文化论坛研讨数字技术保护文化
- 11-28浅析“三鹿集团奶粉事件”危机根源
- 11-28新媒体的发展及其教育创新应用研究
- 11-28楼宇信息系统的现状与应用以及发展趋势
- 11-28中国2009世界邮展60城市巡邮漯河站启动
- 11-28打造焕发生命活力的教育时空
- 11-28观察中国管理教育30年
- 11-28驾驭论:科学发展的新智囊
- 11-28软着陆将解读中国管理国际化新走势
- 11-28创建中国水电国际化强势品牌
- 11-28管理科学进入新观察时代
- 11-28全球化传播语境下的家国建构
- 11-28网络民主对公民社会建设的影响研究
- 11-28奥运后中国酒店业的发展分析
- 11-28国家创新系统下的大学科研管理研究
- 11-28高校数字图书馆建设及服务模式探讨
- 11-28非均衡理论及我国房地产市场供求
- 11-28绿色、安全和通讯是汽车电子的未来
- 11-28敦煌莫高窟将为游客建"数字洞窟"
- 11-28思科新软件平台帮媒体公司建社交网络
- 11-28苹果乔布斯:用13年给IT业洗一次脑
- 11-28海外传真:2008年数字印刷市场回顾
- 11-28东芝将在2009年CES带来新水平的前沿技术
- 11-28互联网:世界的镜子
- 11-28中美文化论坛研讨数字技术保护文化
- 11-28故宫国图面临“数字化”难题 缺乏专门人才
城市轨道交通车辆360°动态图像检测系统设计与研究
2023-10-17 10:45:00 来源:优秀文章
摘要:介绍城市轨道车辆360°动态图像检测系统主要功能及基本结构,根据运用场景需求进行硬件和软件框架设计。
关键词:图像检测系统;在线动态检测;城市轨道交通车辆
中图分类号:U266.2 文献标识码:B 文章编号:1671-2064(2023)13-0052-04
0 引言
随着我国城市轨道交通运营线路不断增多,城市轨道车辆运用安全保障工作变得越来越复杂,中国铁路总公司印发了《车辆专业安全监控技术发展规划》[1]。
设计一种安装在入段走行线(或正线)上,实现车辆进场(通过)时在线动态检测车辆外观和车辆可视部件状态的360°图像检测系统。在车辆通过设备检测区时,采用高速、高分辨率的线阵相机和3D相机对车辆车顶、车底和车侧的可视部件进行2D、3D图像采集,针对关键部件的变形、缺失、异物等异常状态进行自动识别预警,代替部分人工检测,提高检测效率和检测质量[2]。
1 360°图像检测系统主要功能
(1)图像采集,使用2D线阵相机和2D+3D组合相机对车体进行360°全覆盖拍照,以采集车体表面可视部件的图像信息,用于对车体外观和可视部件的缺陷进行识别。
(2)车号采集,当车辆接近检测区时,通过判断接车磁钢检测到的信号,车辆信息采集机控制车号采集单元开启,车辆信息采集机根据车速和车号位置信息进行预判,当车辆接近和通过车号采集单元拍摄区时触发抓拍。
(3)图像传输与存储,线阵采集机和面阵采集机采集到图像信息后,通过图像传输子程序将图像数据传输到数据管理服务器进行存储和图像识别。
(4)故障识别,采用机器视觉和图像识别技术对采集到的图像信息与标准样本进行比对,识别出车辆的异常状态,识别范围包括但不限于螺栓松动、缺失,部件的变形、移位、缺失和异物入侵。
(5)接车与送车,采用磁钢作为检测车轮的传感器,当磁钢感应到有车轮经过时产生感应信号,由此判断是否有车辆通过。
(6)车速测量与计轴计辆,测速模块计划采用磁钢模式。磁钢3#与磁钢4#间距为270±2mm,两组磁钢的功能是实现列车测速和计轴计辆。
(7)关键部件尺寸检测,系统能够采集集电靴滑板厚度和姿态的 3D 点云数据,利用3D点云数据的深度信息通过计算可以检测集电靴碳滑板的姿态、磨耗、破损、断裂等异常情况。
(8)闸瓦磨耗、撒砂管和排障器高度,轨底沉箱和左下、右下设备箱中的图像采集模块可拍摄到闸瓦图片,根据线阵相机的2D图像和面阵相机得到的3D信息,分析得到闸瓦表面的3D模型,通过处理算法计算得到闸瓦的磨耗值。
2 360°图像检测系统基本组成
360°图像检测系统由数据采集装置、控制分析装置、客户终端3部分组成,如图1所示。
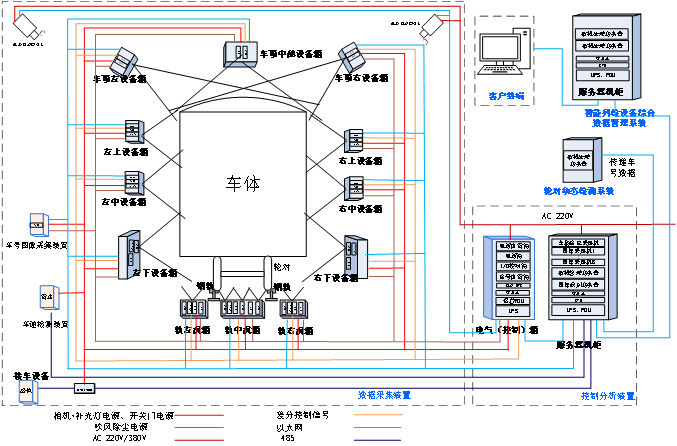
图1 360°图像检测系统框图
2.1数据采集装置
数据采集装置安装于轨底和轨边,实现数据采集功能。数据采集装置包含车辆接近触发开关、图像采集模组、吹风除尘(除雾)设备、车速检测装置、车号图像采集装置和安防系统等其他单元。
2.2控制分析装置
控制分析装置既可安装在轨旁,也可以安装在离数据采集装置较近的现场设备间,实现数据采集装置的供电、控制、数据和图像的采集控制、分析处理、存储,同时与智能列检设备综合数据管理系统进行通讯。控制分析装置由配电设备、控制设备、工控机、数据处理和分析服务器、通信设备、UPS、PDU、电源和信号防雷装置等设备组成。其中服务器机柜内放置工控机、数据处理和分析服务器、通信设备、数据存储设备等信号数据类设备,其余配电设备放置于电气控制柜内[3-4]。
2.3客户终端
客户终端位于远程控制室,是系统的控制中心、数据管理中心和监控中心,由控制机及其外围设备构成。在远程控制中心,可以设置系统参数,查看、统计、分析、打印检测数据[5],监控设备的运行状态和检测过程,如图2、图3所示。
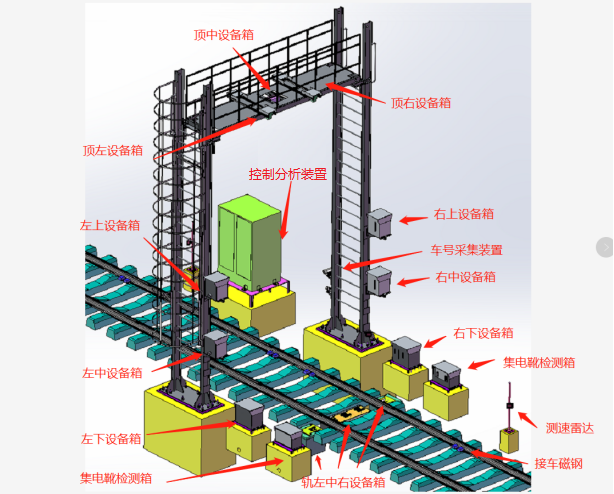
图2 检测设备三维布局设计

图3检测设备现场安装
3检测系统关键部件硬件设计
3.1车底图像采集设备
车底图像采集单元分为轨左沉箱、轨中沉箱和轨右沉箱,沉箱中安装2D+3D组合的图像采集模块,共同完成车底可视部件的图像采集。采集的图像用以检测识别车底异物、螺栓松动、螺栓缺失、划痕、线缆捆扎松脱等缺陷[6]。
3.2车侧图像采集设备
车侧图像采集设备主要由左下设备箱、右下设备箱、左中设备箱、右中设备箱、左上设备箱、右上设备箱和第三轨受流的左右集电靴检测设备箱组成。左下设备箱和右下设备箱的图像采集模块为2D-4K+3D相机,主要对车体转向架、裙摆等区域进行图像采集。检测转向架区域是否有异物、螺栓缺失、螺栓松动等故障缺陷。左中、右中、左上和右上设备箱的图像采集模块为2D-2k相机,主要对侧面车体、车窗区域进行图像采集。集电靴检测设备箱的图像采集模块为3D相机。
3.3车顶图像采集设备
车顶图像采集设备是对车辆顶部进行图像采集。采集的图像用以检测车顶是否有异物、车顶空调外罩螺钉是否缺失等情况。车顶图像采集设备分为车顶左、中、右设备箱。车顶左右设备箱内采用3D相机,车顶中设备箱采用2D-4K相机,共同完成车顶2D和3D数据采集。由于安装在车顶上,采用从上往下的拍摄角度,设备箱不再设置开关门防护。控制原理与轨底沉箱相同,图像采集模块系数如表1所示。
表1 图像采集模块参数
|
|
轨底沉箱2D+3D图像采集模块技术参数 |
左(右)设备箱2D+3D图像采集模块技术参数 |
受流器3D图像采集模块技术参数 |
车顶侧设备箱3D图像采集模块技术参数 |
|
供电电压 |
DC24V |
DC24V |
DC24V |
DC24V |
|
相机最大像素 |
2048(线阵)、2048×1152(面阵,可开窗) |
4096(线阵)、1280×864(面阵,可开窗) |
2048×1152(面阵,可开窗) |
2048×1152(面阵,可开窗) |
|
景深范围 |
不低于1100mm(满足车辆底部拍摄要求) |
不低于1100mm(满足车侧走行部拍摄要求) |
不低于500mm(满足受流器拍摄要求) |
不小于600mm(满足车顶拍摄要求) |
|
最大尺寸测量误差 |
±2.5mm |
±2.5mm |
±1mm |
±2.5mm |
|
滑板有效检测长度 |
|
|
400mm |
|
3.4车号采集设备
系统安装车号图像采集设备用以采集车辆的车号和端位信息。车号采集设备可根据系统控制信号拍摄车辆的车号和端号图片,通过设备集成的图像识别软件输出车号和端号信息。车号采集设备考虑夜间黑暗环境的拍摄情况,自带补光设备。车号采集设备技术参数如表2所示。
表2 车号采集设备技术参数
|
|
车号采集设备技术参数 |
|
供电电压 |
DC24V |
|
图像像素 |
不低于300万 |
|
识别准确率 |
不低于99% |
|
数据通信接口 |
千兆以太网 |
|
控制信号接口 |
支持差分信号(±6V)或内触发 |
|
防水防尘等级 |
IP67 |
3.5车速检测设备
车速检测设备主要由雷达组成,雷达实时采集过车速度,车辆信息采集机根据车速信息,通过计算后给出用来触发图像采集设备的采集频率控制信号。雷达具体性能要求如表3所示。
表3 雷达技术参数
|
|
雷达技术参数 |
|
供电电压 |
DC 24V |
|
测量范围 |
5km/h~120km/h |
|
分辨率 |
0.1km/h |
|
测速误差 |
不高于1% |
|
数据刷新 |
不小于10次/秒 |
|
安装角度 |
10°~40° |
4 检测系统软件部分
如图4所示,360°图像检测系统软件层次结构主要可分为3个软件,分别为综合应用软件、数据采集软件、图像识别软件。在这些软件下还包含具体的功能单元,即综合应用软件包含系统控制、设备运行状态监测、车速值采集、车号信息采集并转发和数据管理,数据采集软件包含原始图像采集、相机运行状态监测和图像数据传输,图像识别软件包含图像拼接、故障识别、故障标识,各个软件间根据通信协议进行通信和数据交互,各功能单元间相互独立,降低软件间的耦合度,保证系统运行的稳定可靠,并提高系统的可维护性和扩展性[7]。
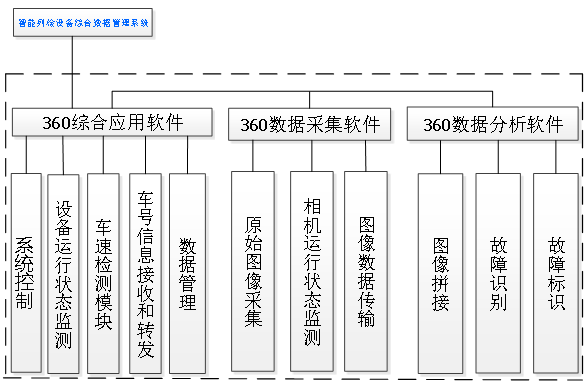
图4图像检测系统软件层级结构
5性能及参数设计分析
5.1车底图像采集设备参数计算
车底图像采集设备主要由轨左沉箱2D+3D模块、轨中沉箱左侧2D+3D模块、轨中沉箱中部2D+3D模块、轨中沉箱右侧2D+3D模块、轨右沉箱2D+3D模块组成,底部所有模块视觉设计方案相同。
2D+3D视觉模块采用1个线阵、1个面阵、2个不同波段线激光的方式采集车底可视部件的图像。单个模块2D图像采用2k线阵相机,采用12mm镜头,2D图像典型分辨率达到0.5mm/像素。
3D图像部分采用1个面阵相机、1个线结构光、1个6mm镜头,平面方向成像分辨率为1280mm,此时平面图像精度约1mm,深度方向平均分辨率约为6mm。
5.2 车侧图像采集设备参数计算
车侧图像采集设备主要包括左下设备箱2D+3D模块、右下设备箱2D+3D模块、左中设备箱2D模块、右中设备箱2D模块、左上设备箱2D模块、右上设备箱2D模块。其中,左下设备箱2D+3D模与右下设备箱2D+3D模块视觉设计方案相同。左中设备箱2D模块、右中设备箱2D模块、左上设备箱2D模块、右上设备箱2D模块视觉方案设计相同。
左下设备箱2D+3D模块采用二组1个线阵、1个面阵、2个不同波段线激光方式采集转向架图像。单个左下设备箱2D模块采用4k高清线阵相机,采用25mm镜头,系统单位像素精度达到0.25mm。
单个3D图像采用1个面阵相机、1个线结构光、1个12mm镜头,平面方向成像分辨率为1280mm,此时平面图像精度约1mm,深度方向平均分辨率约为6mm。
左中设备箱2D模块采用2k高清线阵相机,采用8mm镜头,系统单位像素精度达到1mm,车顶图像采集设备参数计算。
车顶图像采集设备主要包括车顶左设备箱3D模块、车顶中部设备箱2D模块、车顶右设备箱3D模块。
车顶中部设备箱2D模块采用1个线阵相机,1个线激光方式采集车顶图像,采用4K高清线阵相机,25mm镜头,系统单位像素精度达到1mm。
顶部左右设备箱3D模块采用1个面阵相机、1个线激光、1个12mm镜头的方式检测车体顶部外观缺陷故障。平面方向成像分辨率为1280mm,此时平面图像精度约2mm,深度方向平均分辨率约为6mm。
5.3集电靴图像采集设备参数计算
集电靴图像采集设备使用3D模块对集电靴进行检测。
集电靴检测模块采用1个面阵相机,1个线激光方式检测集电靴故障,使用12mm镜头,平面方向成像分辨率为1280mm,此时平面图像精度约1mm,深度方向平均分辨率约为4mm。成像示意图如图5、图6所示。
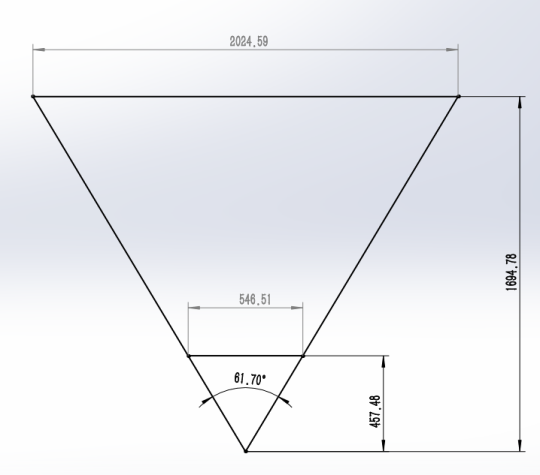
图5 线阵成像示意图
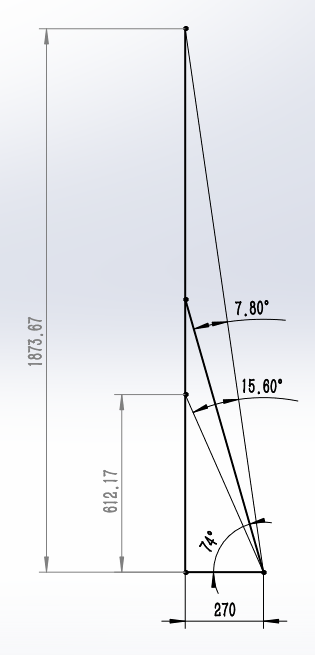
图6 面阵成像示意图
6 运用效果
360°图像检测系统,从2022年3月至2022年10月,自动采集车顶、车侧、车底可视部件的高清图像,通过图像分析识别,对车顶受电弓、车侧车门、车侧车窗、车底箱体、牵引电机、制动器、齿轮箱、轴箱、轮对等关键部位缺失、变形、损伤等异常情况进行检测并报警提示;故障检出率:车顶受电弓部分≥85%,转向架部分≥85%,转向架部分≥85%,制动系统部分≥85%,其他车下部件≥85%。
参考文献
[1] 欧海霞.城市轨道交通列车风源系统智能模块的设计[D].长沙:湖南大学,2012.
[2] 冯江华.轨道交通装备技术演进与智能化发展[J].控制与信息技术,2019,(1):1-6,11.
[3] 蒋利容.机车底部故障图像识别技术研究[D].成都:西南交通大学,2013.
[4] 方素平,夏晓华,肖燕,等.一种线阵相机镜头畸变的标定方法[J].西安交通大学学报,2013,47(1):11-14.
[5] 肖齐.铁路客车故障轨旁图像监测系统(TVDS)统型机设计及运用[J].铁道机车车辆,2018,38(1):43-45,49.
[6] 李伟,李言义,张雄飞,等.地铁车辆车轮多边形的机理分析[J].机械工程学报,2013,49(18):17-22.
[7] 詹伟,徐永能,王依兰.城市轨道交通车辆智能运维系统应用研究[J].城市公共交通,2018,(12):28-31,36.
The Design and Research of 360 ° Dynamic Image Detection System for Urban Rail Transit Vehicles
YANG Zhenghua
(CRRC Zhuzhou Electric Locomotive Research Institute Co., Ltd., Zhuzhou Hunan 412001)
Abstract:The paper introduces the main functions and basic structure of the 360° dynamic image detection system for urban rail vehicles, and designs the hardware and software framework according to the requirements of the application scenario.
Key words:image detection system;online dynamic detection;urban rail transit vehicles
